有用なコンセプト
ContextCaptureの上級者向けのご使用にあたっては、写真測量と測地学のいくつかのコンセプトを知る必要があります。
カメラの内部標定/固定パラメータは、カメラの内部プロパティを指します。すなわち、カメラのセンサーサイズ、レンズの焦点距離、画像面のプリンシパルポイントの位置、レンズディストーションなどです。
同一の内部標定を有する写真データセットをフォトグループと呼んでいます。そして、フォトグループのプロパティはフォトグループ内の全写真が共有している内部標定を指します。
 実際上、内部標定は設定が定まっている1つの物理的カメラに固有のものです。同一モデル、同一設定の2つのカメラであっても、それぞれで撮った写真は別個の扱いです。
実際上、内部標定は設定が定まっている1つの物理的カメラに固有のものです。同一モデル、同一設定の2つのカメラであっても、それぞれで撮った写真は別個の扱いです。
カメラの外部標定/位置と回転は、カメラの光心の3D位置と、世界座標系のセンサーによる座標系の3D回転を指します。
フォトグループから3Dリコンストラクションを行うには、ContextCaptureは、各入力フォトグループのプロパティと各入力写真の位置と回転を正確に知る必要があります。これらのプロパティを無視したり、正確性を欠く場合、ContextCaptureはAT(空中三角測量)によって自動的に推定計算します。
ATの重要な手順の1つに、2枚以上の異なる写真に写っている同じ場所のピクセルを特定することが挙げられます。
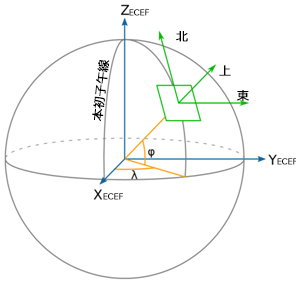
写真に座標定義される際、ContextCaptureは、Earth Centered Earth Fixed(ECEF)空間参照系を利用します。ECEFは標準的なグローバルデカルト座標系です。詳細については、http://en.wikipedia.org/wiki/ECEFを参照してください。
ContextCaptureは写真位置にECEFを使用する一方で、3DリコンストラクションにはローカルEast-North-Up(ENU)空間参照系を使用します。ENUはローカルベースのデカルト座標系であって、WGS84の楕円体に適応しており、東方向をX軸、北方向をY軸、上方向をZ軸としています。ENUは、Z軸が上方向のベクトルと一致しているため、ECEFより快適な操作性を実現しています。もっとも、ContextCaptureによって生成された3Dモデルは後からいかなる座標系でも再投影できます。
場合によっては、ContextCaptureは、2つの地理座標(経度、緯度)または2つの投影座標(X、Y)を使用して、座標付けされた位置を表現します。これらの座標は、楕円体高(準拠楕円体からの高さ)によって補完されます(楕円体は通常WGS84ですが、たとえばGRS80のようにSRSによって異なる場合もあります)。楕円体高は海抜高度とは異なります。海抜高度は、海水面上の高度に近い一般的な高度です。ContextCaptureは、海抜高度ではなく楕円体高を採用しています。なぜなら、楕円体高はシンプルで明快な数学的定義を有している一方、海抜高度はサンプリングや精密度の問題に影響を受けるジオイド高グリッドに基づいているからです。